
Against all Forces
Dizz3 is a special construction - when starting the robot his center of gravity shifts to the front. By changing the center of gravity Dizz3 needs less energy to start rolling.
In the following we try to find out if the difference of needed energy is measurable. Moreover we investigate the general needed power on different floor covers with and without changing the center of gravity - Keyword sticktion or static friction. We will use a small program determining the motor power when the robot is start moving.
We are making 4 different experiments each with 6 repetitions.
Experiments 1 and 2 investigate the behavior on different floor covers.
Experiments 3 and 4 will show, compared with the results of experiments 1 and 2, the advantage of Dizz3.
Aim of the Mission
Investigation of static friction and check if the constructive advantage of Dizz3 is measurable.
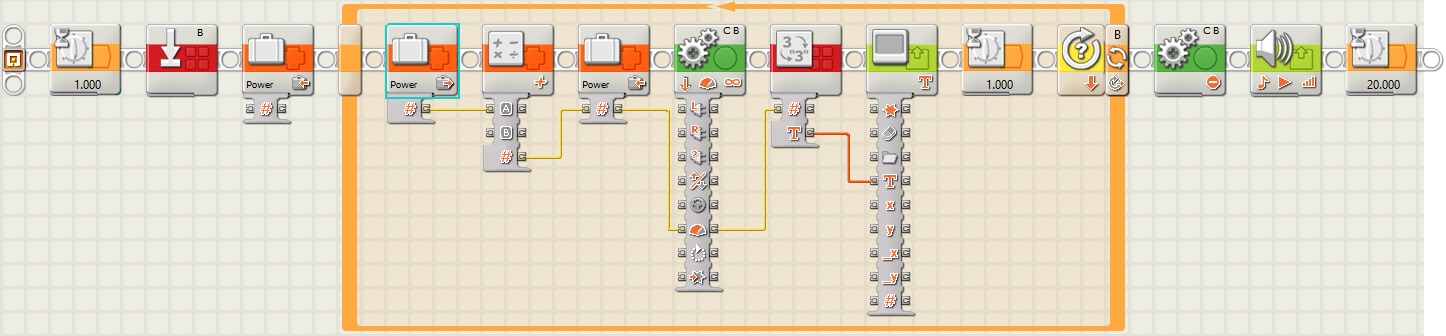
Program
The following program increases - starting by zero - each second the used motor power. At the same time the distance of one of the motors is measured. If a defined, sort distance is measured, the program stops and the actual motor power is shown in the display.
In other words, the program determine the motor power needed to start rolling.
Because some of the following experiments can be done with Dizz3 for NXT or EV3 and also with robots having 3 or 4 wheels, I provide program versions for Lego NXT and EV3 to download:
NXT:
EV3:

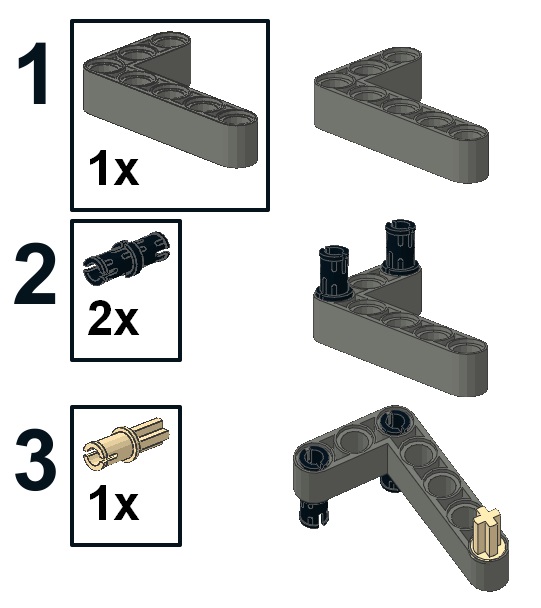
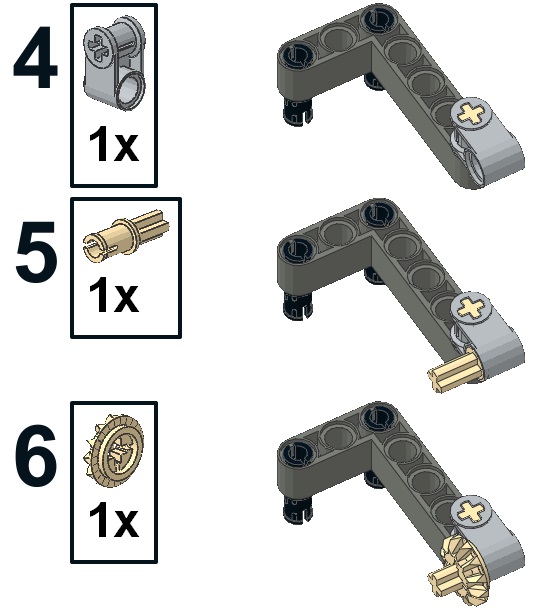
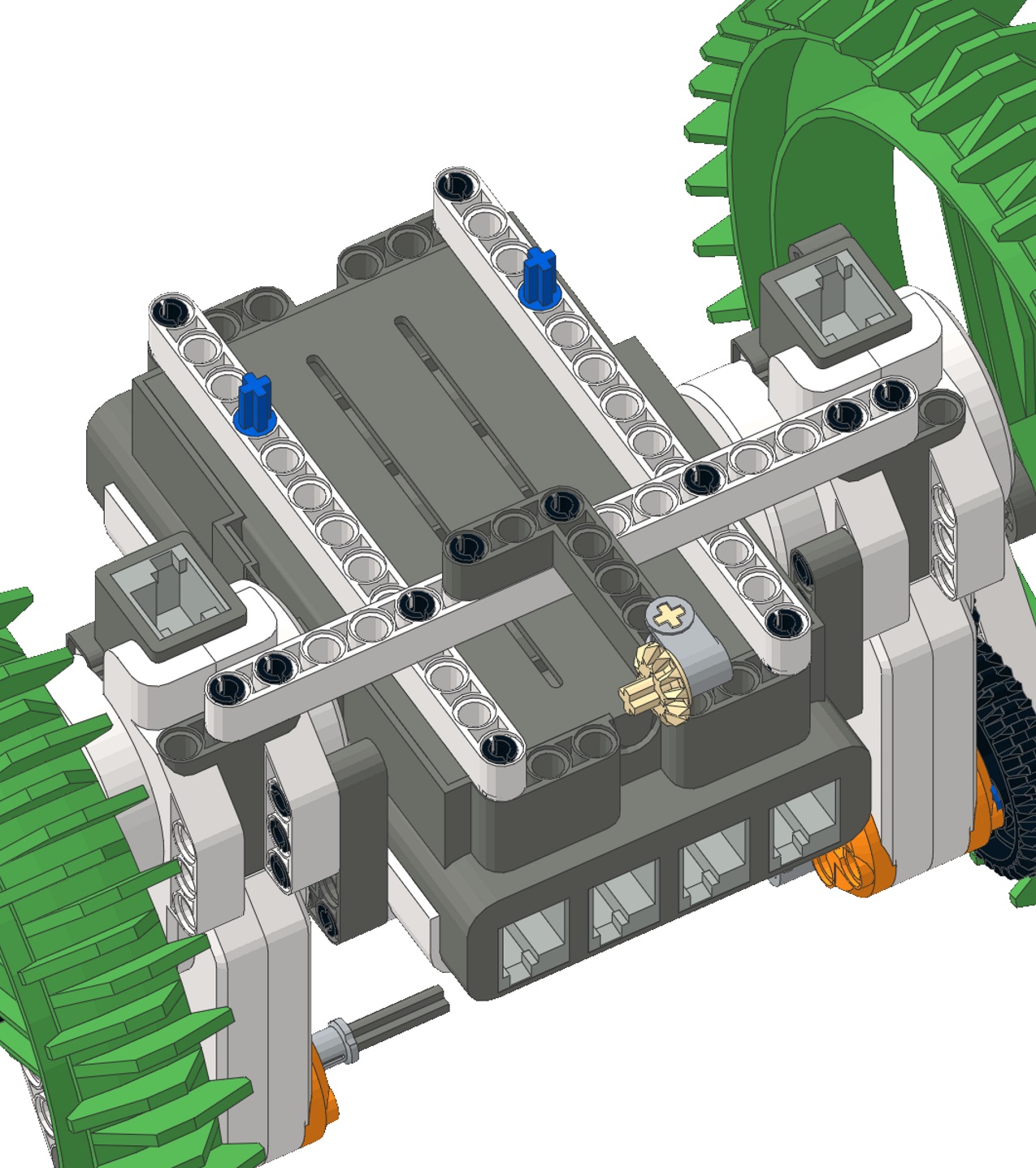
Caster Wheel for Dizz3
During the first two experiments a caster wheel is added to Dizze3 to prevent the center of gravity to be shifted.
Build the caster wheel and add it to Dizz3:
Experiment 1: floor cover is carpet - without center of gravity shift
Mount the caster wheel to Dizz3 - this makes it to a 3 wheel robot that is not able to shift its center of gravity.
Place Dizz3 on the carpet and start the program till you here a sound.
Note down the shown value and repeat the experiment another 5 times:
| Pass | carpet - 3 wheels |
|---|---|
| 1 | 25 |
| 2 | 28 |
| 3 | 25 |
| 4 | 22 |
| 5 | 25 |
| 6 | 23 |
| Average | 25.7 |
Experiment 2: floor cover is floor tile - without center of gravity shift
Execute experiment 1 again on a more slippery floor cover like floor tile or laminate.
Do the experiment 6 times and note down the results:
| Pass | smooth surface - 3 wheels | carpet - 3 wheels |
|---|---|---|
| 1 | 16 | 25 |
| 2 | 14 | 28 |
| 3 | 15 | 25 |
| 4 | 18 | 22 |
| 5 | 16 | 25 |
| 6 | 17 | 23 |
| Average | 16 | 25.7 |
Intermediate Result
Differences can be observed already after the first two experiments. On the carpet the robot needs more power than on floor tile or laminate. The reason for that is friction that has to be overcome when the robot pulls out.
The friction is depending on the used material of the wheels, the used material of the floor cover and from the robot weight. In other words - as much as the wheels can indent with the floor so much the more power is needed to pull out.
Experiment 3: floor cover is carpet - with center of gravity shift
Now it's getting interesting. Remove the caster wheel from Dizz3 so it is again a two-wheeler.
If you execute the program again It can be observed that Dizz3 is shifting its middle part to the front. That means the center of gravity is more ahead.
Repeat experiment 1 - without caster wheel but on the same carpet - 6 times and note down the values in the table:
| Pass | carpet - 2 wheels | smooth surface - 3 wheels | carpet - 3 wheels |
|---|---|---|---|
| 1 | 18 | 16 | 25 |
| 2 | 17 | 14 | 28 |
| 3 | 18 | 15 | 25 |
| 4 | 20 | 18 | 22 |
| 5 | 16 | 16 | 25 |
| 6 | 16 | 17 | 23 |
| Average | 17.5 | 16 | 25.7 |
Experiment 4: floor cover is floor tile - with center of gravity shift
Repeat experiment 3 on the same floor as in experiment 2. Note down 6 results.
| Pass | smooth surface - 2 wheels | carpet - 2 wheels | smooth surface - 3 wheels | carpet - 3 wheels |
|---|---|---|---|---|
| 1 | 13 | 18 | 16 | 25 |
| 2 | 16 | 17 | 14 | 28 |
| 3 | 11 | 18 | 15 | 25 |
| 4 | 13 | 20 | 18 | 22 |
| 5 | 17 | 16 | 16 | 25 |
| 6 | 15 | 16 | 17 | 23 |
| Average | 14.2 | 17.5 | 16 | 25.7 |
Result
1. A robot can pull out with less power on a more smooth surface, because off less friction.
2. Because Dizz3s ability to change its center of gravity, it needs less power than other robots. It is like walking. Just stand still and move the upper part of your body slowly ahead - you will automically start to walk ;-)
Remark
Experiments 1 and 2 can be done also with other kinds of wheel driven robots.
Links
More information can be found here:
Wikipedia - Friction