
Gegen alle Widerstände
Dizz3 kann durch seine Konstruktion etwas Besonderes - beim Losfahren kippt er den Rumpf leicht nach vorne und verlagert so seinen Schwerpunk. Durch die Verlagerung des Schwerpunktes benötigt Dizz3 weniger Kraft zum Losfahren als mit starrem Schwerpunkt.
Im Folgenden wollen wir untersuchen, ob der Unterschied durch die Schwerpunktverlagerung auch messbar ist. Überdies untersuchen wir, die generell benötigte Motorleistung auf verschiedenen Untergründen mit und ohne Schwerpunktverlagerung - Stichwort Haftreibung. Dazu hilft ein kleines Programm, welches feststellt bei welcher Motorleistung der Roboter losfährt.
Insgesamt machen wir 4 unterschiedliche Versuche mit je 6 Wiederholungen.
Versuch 1 und 2 untersuchen das Verhalten auf verschiedenen Bodenbelägen.
Versuch 3 und 4 sollen, im direkten Vergleich mit den Ergebnissen aus 1 und 2, die Vorzüge von Dizz3 verdeutlichen.
Missionsziel
Wie macht sich Haftreibung generell bemerkbar und was macht Dizz3 hier so besonders.
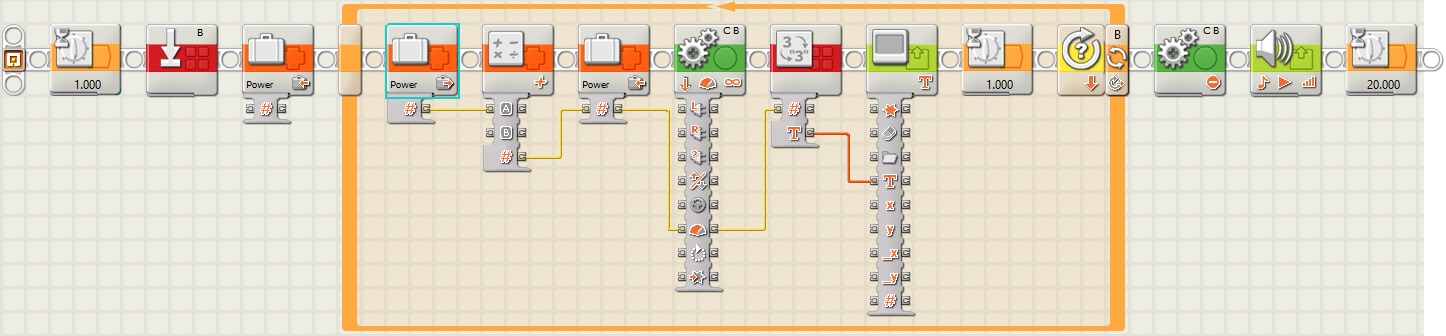
Programm
Das folgende Programm erhöht - ausgehend von Null - im Sekundentakt die Energie, die an die Motoren angelegt wird. Gleichzeitig misst es die zurückgelegte Stecke eines der Motoren. Wurde eine festgelegte - sehr kurze - Stecke gemessen, stoppt das Programm und zeigt den aktuell angelegten prozentualen Energiewert an.
Mit anderen Worten, dass Programm bestimmt die ungefähre Energiemenge, die man braucht um mit dem Roboter loszufahren.
Da die Experimente sowohl mit Dizz3 für NXT als auch EV3 ausgeführt werden können und teilweise auch mit anderen, 3 oder auch 4 rädrigen, Robotern funktionieren, stelle ich hier eine Version für Lego NXT als auch EV3 zum Download zur Verfügung:
NXT:
EV3:

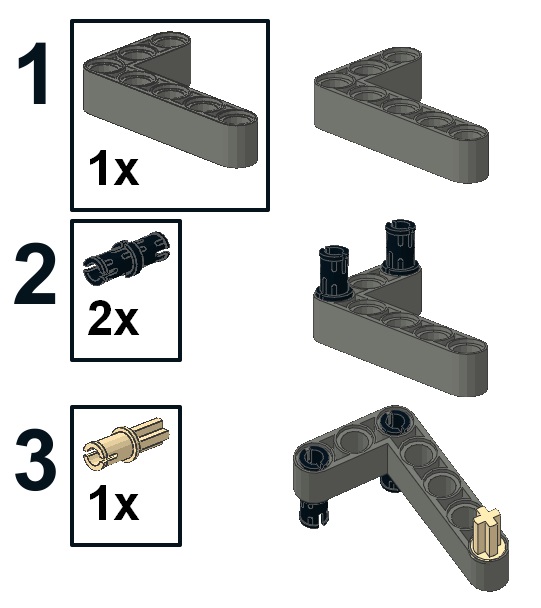
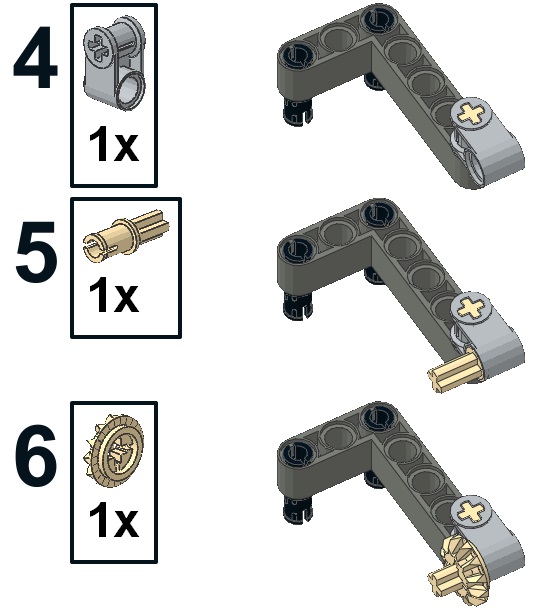
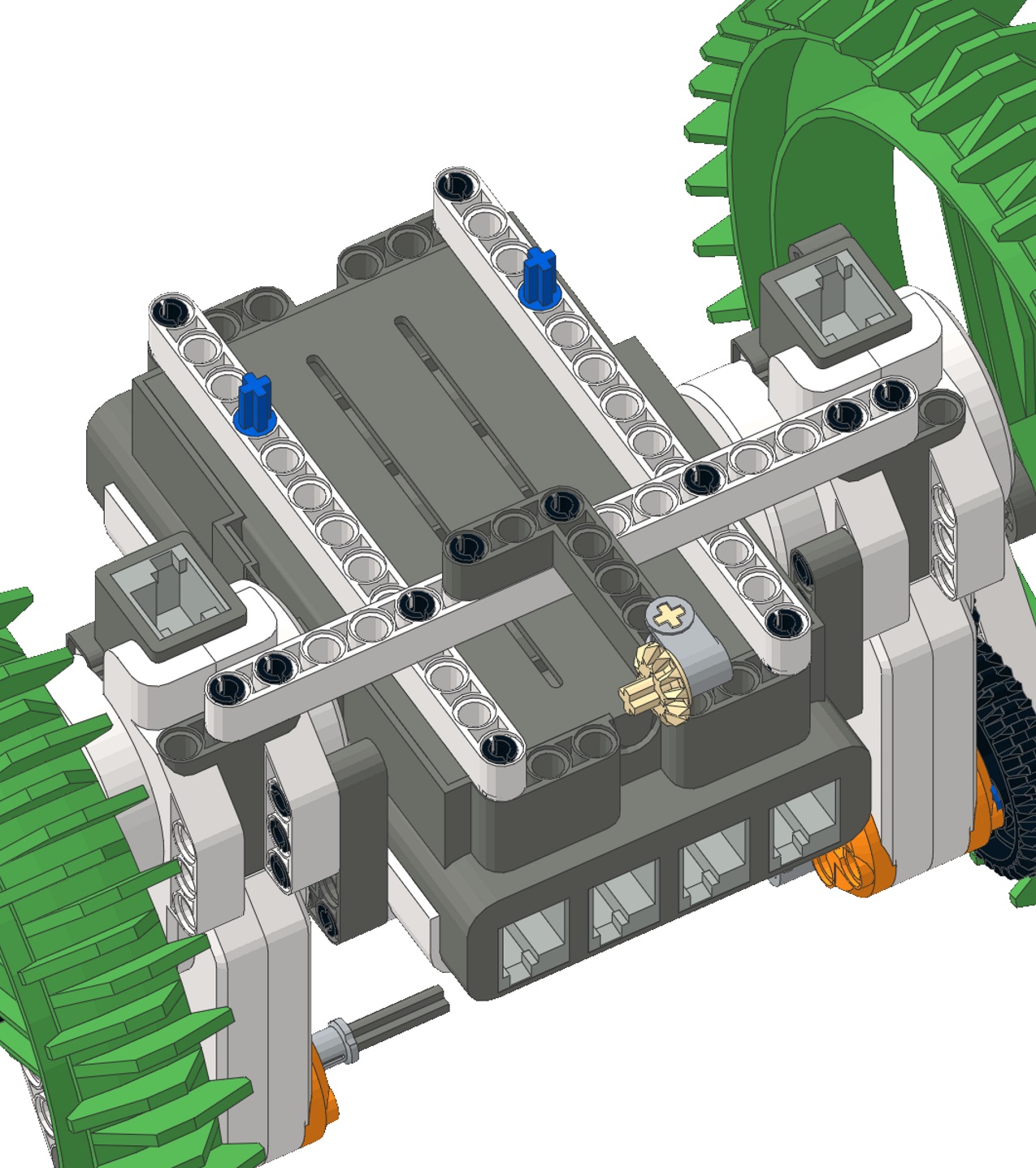
Stützrad für Dizz3
Die ersten beiden Versuche führen wir ohne die Schwerpunktverlagerung von Dizz3 durch. Wir machen aus Dizz3 ein Dreirad.
Hierzu brauchen wir ein kleines Stützrad:
Versuch 1: Fahren auf Teppich ohne Schwerpunktverlagerung
Um zu verhindern, dass Dizz3 seinen Schwerpunkt verschiebt machen wir aus ihm, mit Hilfe des Stützrads, einen gewöhnlichen dreirädrigen Roboter.
Dizz3 wird auf einen Teppichboden gestellt und das Programm gestartet bis schließlich der Signalton ertönt.
Der angezeigte Wert wird notiert - insgesamt 6mal:
| Durchlauf | auf Teppich mit 3 Rädern |
|---|---|
| 1 | 25 |
| 2 | 28 |
| 3 | 25 |
| 4 | 22 |
| 5 | 25 |
| 6 | 23 |
| Durchschnitt | 25.7 |
Versuch 2: Fahren auf glatter Fläche ohne Schwerpunktverlagerung
Wir wiederholen Versuch 1 - nur diesmal nicht auf einem Teppich sondern auf einem möglichst glatten Boden wie Küchenfliesen oder Laminat.
Wieder wird das Programm 6mal gestartet und die Resultate notiert:
| Durchlauf auf | glatter Fläche mit 3 Rädern | Teppich mit 3 Rädern |
|---|---|---|
| 1 | 16 | 25 |
| 2 | 14 | 28 |
| 3 | 15 | 25 |
| 4 | 18 | 22 |
| 5 | 16 | 25 |
| 6 | 17 | 23 |
| Durchschnitt | 16 | 25.7 |
Zwischenergebnis
Bereits nach den ersten beiden Versuchen sind deutliche Unterschiede festzustellen. Auf Teppich wird mehr Energie zum Losfahren benötigt als auf glattem Boden. Das liegt an der sogenannten Haftreibung, die beim Losfahren (Losbrechen) zu überwinden ist.
Die Haftreibung hängt von den verwendeten Materialien (Rad und Untergrund) und dem Gewicht des Roboters ab. Grob gesagt - je besser sich die Räder mit dem Untergrund verzahnen können desto mehr Energie braucht man zum Losfahren.
Versuch 3: Fahren auf Teppich mit Schwerpunktverlagerung
Jetzt wird es spannend. Wir entfernen das Stützrad und machen Dizz3 somit wieder zum Zweirad.
Wir beobachten, dass Dizz3 beim losfahren seinen Mittelteil leicht nach vorne/oben schiebt. Dadurch liegt sein Gewicht/Schwerpunkt jetzt etwas weiter vorne.
Wir wiederholen Versuch 1 ohne Stützrad - gleicher Bodenbelag - und tragen die Werte in unsere Tabelle ein.
| Durchlauf auf | Teppich mit 2 Rädern | glatter Fläche mit 3 Rädern | Teppich mit 3 Rädern |
|---|---|---|---|
| 1 | 18 | 16 | 25 |
| 2 | 17 | 14 | 28 |
| 3 | 18 | 15 | 25 |
| 4 | 20 | 18 | 22 |
| 5 | 16 | 16 | 25 |
| 6 | 16 | 17 | 23 |
| Durchschnitt | 17.5 | 16 | 25.7 |
Versuch 4: Fahren auf glatter Fläche mit Schwerpunktverlagerung
Wir wiederholen Versuch 3 auf dem gleichen Bodenbelag der in Versuch 2 verwendet wurde.
| Durchlauf auf | glatter Fläche mit 2 Rädern | Teppich mit 2 Rädern | glatter Fläche mit 3 Rädern | Teppich mit 3 Rädern |
|---|---|---|---|---|
| 1 | 13 | 18 | 16 | 25 |
| 2 | 16 | 17 | 14 | 28 |
| 3 | 11 | 18 | 15 | 25 |
| 4 | 13 | 20 | 18 | 22 |
| 5 | 17 | 16 | 16 | 25 |
| 6 | 15 | 16 | 17 | 23 |
| Durchschnitt | 14.2 | 17.5 | 16 | 25.7 |
Ergebnis
1. Ein Fahrzeug/Roboter kann auf ebenen Fläche besser anfahren als auf unebenen - das liegt an der sogenannten Haftreibung.
2. Dizz3 kann durch seine Konstruktion, also der Fähigkeit seinen Schwerpunkt zu verlagern, leichter losfahren als andere Roboter. Es ist im Grunde wie bei uns mit dem Laufen. Einfach mal gerade hinstelle und langsam nach vorne fallen lassen - irgendwann läuft man dann von ganz alleine ;-)
Anmerkung
Die Versuche 1 und 2 können auch mit anderen Arten von rädergetriebenen Roboter durchgeführt werden.
Links
Weitere Informationen zum Thema findet ihr unter:
Wikipedia - Haftreibung